Habilitation overview
In December 2021,I defended my Habilitation (in French “Habilitation à diriger des recherches” – HDR) in microrobotics. The title of my research work was “Magnetic Microrobotics for Biomedical Applications” [5]. This manuscript summarizes my teaching and research activities since my recruitment as an associate professor in 2008.
Summarizing thirteen years of hard work is a valuable exercise. It provides an opportunity to reflect and identify the common thread that has motivated my personal and professional pursuits. It is important to acknowledge that these endeavors were the result of collaborative efforts, whether with colleagues, co-authors, or students under my supervision. However, it is challenging to account for all the achievements so far, and I had to make some choices while writing my dissertation. Although other works are equally appealing, I aimed to maintain consistency in the manuscript. Specifically, in the second part, I focused on my primary scientific contributions concerning magnetic microrobots that navigate through the cardiovascular system for biomedical applications.
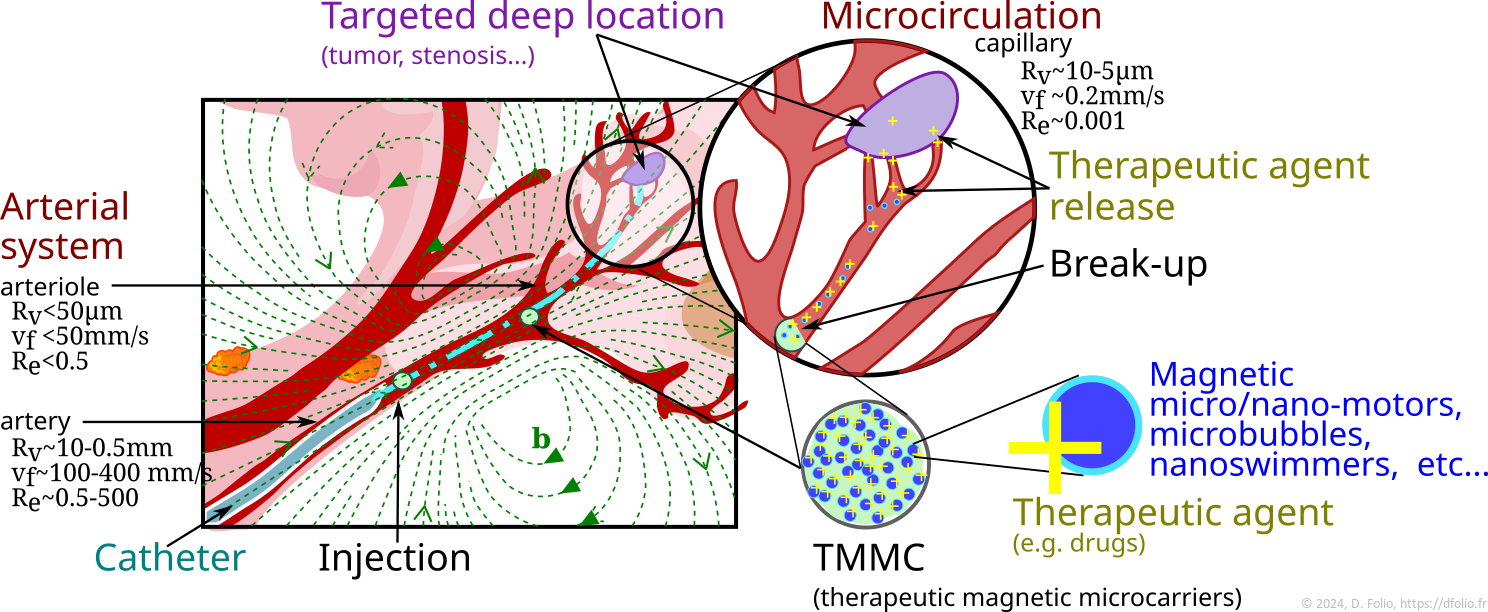
My research focus on modeling and controlling of microrobotic systems in a biomedical context, as one illustrated in Figure 1. Different research groups are working to develop solutions that can be applied to the human body. So far, magnetic actuation has emerged as the most suitable approach for these applications [3], [11], [15]. The field of this original theme is still in progress with the ambition of modernizing current therapies by improving therapeutic targeting while enhancing patient comfort. To achieve this goal, it is important to have a good understanding of the microrobots that evolve in the human body [15], [21]. The theoretical foundation and physical laws governing magnetic microrobots in vascular-like environments were studied [1], [2], [4], [6]–[9], [12], [14]. A methodology was developed to handle multiphysics approaches that combine different sources of uncertainties and hypotheses [13]. The validations were carefully conducted through experiments or numerical analysis when necessary. This help us to better understand the overriding dynamics, as well as the predominant parameters in the description of magnetic microrobots in a vascular-like environment. This makes possible to fully characterize their behaviors in a viscous flow and their responses to magnetic fields.
All of these helped us to propose advanced navigation strategies for our microrobots [10], [16]–[20]. Our navigation process can be divided in two levels. First, we plan (off-line) really feasible navigation paths based on the FMM. With the proposed navigation planning framework, we can take into account different constraints and objectives to get a really feasible reference path. Second, we synthesized control schemes that drive the magnetic microrobots along the reference to the targeted location. To this aim, we have chosen to implement predictive control and optimal control laws.
All of our proposed models and navigation strategies were then evaluated through various experiments in different conditions. To do so, various proof-of-concept platforms were developed within the PRISME Laboratory and through our collaborations. To further extend the magnetic actuation capability, we have also extensively studied the design of electromagnetic systems. These EMA platforms that meet properly the specifications of the biomedical operation would produce magnetic fields and gradients more suited to the needs. This knowledge allowed us to build the OctoRob platform.
Habilitation Details
I obtained my Habilitation in Robots Control from University of Orleans (France) on December 3, 2021, which was entitled: “Magnetic Microrobotics for Biomedical Applications: Modeling, Simulation, Control and Validations” [5].
- Manuscript
- D. Folio’ Habilitation thesis (view )
- Slides
- D. Folio’ Habilitation defense slides (view )
- Defended
- the 3rd December 2021
- Committee
-
President Chantal Pichon (Prof. des Université, Orléans) Reviewers Michaël Gauthier (DR, CNRS, FEMTO-ST, Besançon)
Sylvain Martel (Prof. Polytechnique Montréal, Canada)
Philippe Poignet (Prof. des Universités, Univ. Montpellier)
Examiners Christine Prelle (Prof. des Universités, UTC)
Mohammed Samer (Prof. des Universités, Univ. Paris-Est Créteil Val de Marne)
Li Zhang (Prof., Dept. MAE, CUHK, Hong Kong)
Guarantor Antoine Ferreira (Prof. des Universités, INSA Centre Val de Loire)
References
Reuse
Citation
@phdthesis{folio2021,
author = {Folio, David},
publisher = {University of Orleans},
title = {Magnetic {Microrobotics} for {Biomedical} {Applications}},
date = {2021-12-03},
address = {Bourges, France},
url = {https://dfolio.fr/publications/thesis/folio2021hdr.html},
langid = {en},
abstract = {This research work mainly focuses on the study of the
modeling and control of microrobotic systems in a biomedical
context. So far, the use of magnetic actuation has been regarded as
the most convenient approach for such achievements. Besides, the
cardiovascular system allows to reach most parts of the human body
and is then chosen as the main navigation route. This original topic
is a rapidly expanding field whose ambition is to modernize current
therapies by trying to improve therapeutic targeting while improving
patient comfort. To achieve this goal, a good understanding of how
microrobots evolve in the human body is an important step. The
theoretical foundations and the physical laws that make it possible
to describe the various phenomena which act on magnetic microrobots
in vascular-like environments have thus been deeply studied.
Methodologies for dealing with multiphysics approaches combining
different sources of hypotheses and uncertainties have been
developed. Great care has been taken in their validations by
experimentation when possible, otherwise by numerical analysis. This
helps to better understand the dominant dynamics, as well as the
predominant parameters in the description of magnetic microrobots in
a vascular-like environment. This makes it possible to efficiently
characterize and predict their behaviors in a viscous flow and their
responses to magnetic fields. On this basis, advanced navigation
strategies have been developed. The navigation process can be
divided into two stages. First, safe and efficient navigation paths
are planned (off-line) based on the fast marching method (FMM). With
the proposed navigation planning framework, different constraints
and objectives can then be taken into account to obtain a truly
feasible reference path. Second, control schemes that drive the
magnetic microrobots along the planned reference path to the
targeted location are synthesized. To do so, predictive and optimal
control laws have been implemented. All the proposed models and
navigation strategies have been evaluated through various
experiments under different conditions with the platforms developed
at the PRISME~Laboratory.}
}